按上一篇的方式疏通咖啡机管路试水后,满心以为咖啡机好了,没想到再开机还是有异常,机子的预热灯一直闪,闪烁的模式是双闪然后暂停,然后循环,而且最终也不会变成常亮状态。
在中文和英文网站上搜索了一阵子,没有发现。后来试着问了 Google Gemini AI,它告诉我可能是主板上的 X2 安规电容坏了。循着思路果然找到了 Youtube 上关于更换电容的视频。
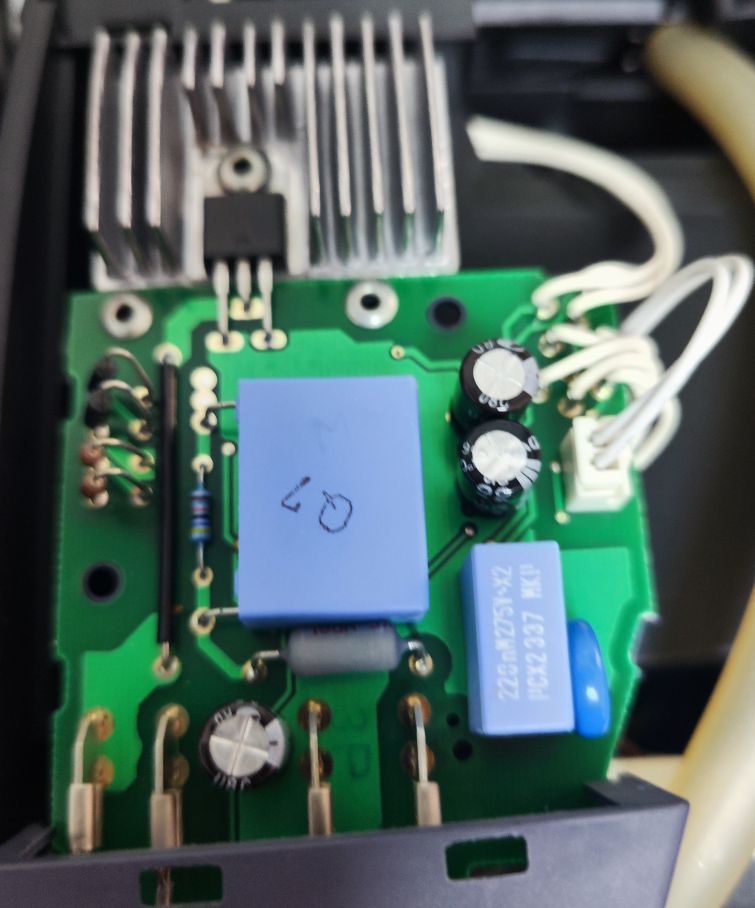
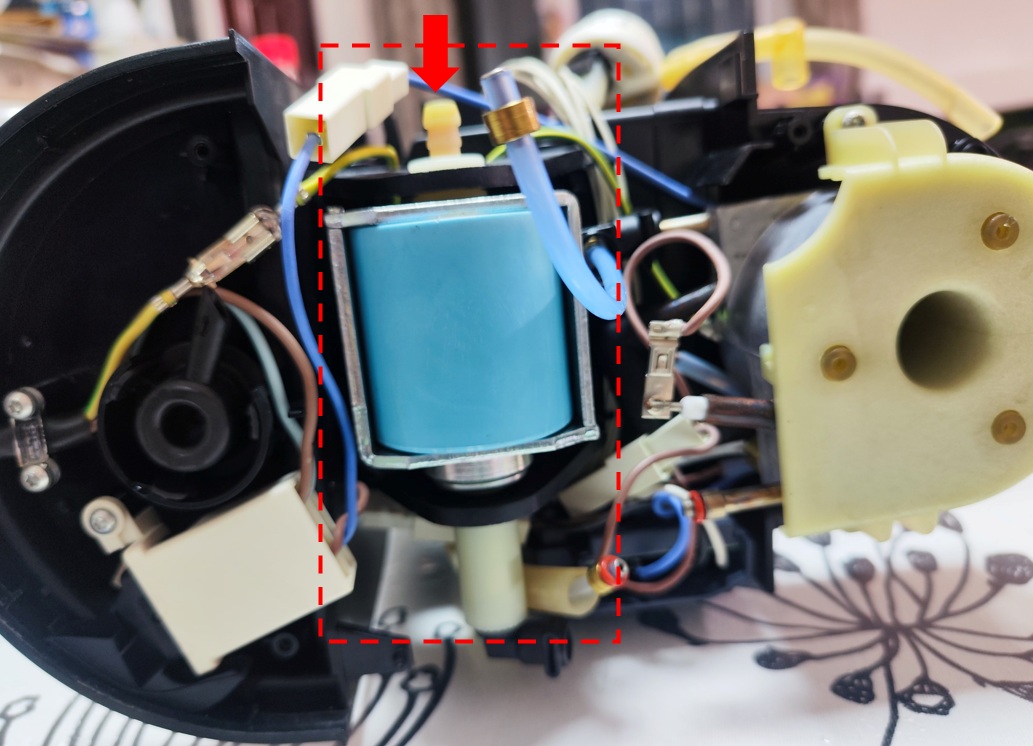
拆开机器,打开电路板盖,可以看到主板上有两个大号的安规电容(图中蓝色)。查看了型号分别是:680nF 275V 22mm脚距、220nF 275V 15mm脚距。在淘宝上照着规格一样买了 2 个,含运费 1.94 元。

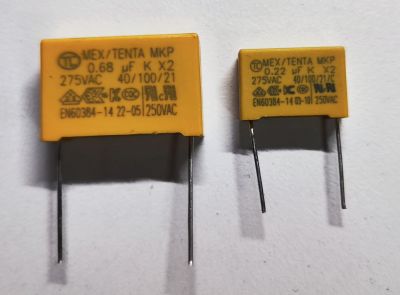
上图分别是原电路的和新买的安规电容。到货后,拾起电烙铁,小心地更换上。

拧好螺丝,通电试机。开机后,闪灯的节奏恢复了说明书中的正常间隔。双按钮长按也可以正常进入和退出除垢模式。机器终于工作正常了。